About Me
Greetings. I am a graduate student at the Harbin Institute of Technology (Shenzhen), conducting research in robotic manipulation and reinforcement learning at the Intelligent Perception and Control Laboratory. My research interests encompass robotic manipulation, whole body control and manipulation, multi-modal perception in robotics, and the integration of large language models (LLM) with robotic systems.
Interests
- Embodied AI
- Robotic Manipulation
- Visual-Tactile Perception
- Humanoid Robotics
Education
Ph.D in Microelectronics
The Hong Kong University of Science and Technology, Guangzhou
MEng Control Engineering (Electrical Engineering)
Harbin Institute of Technology, Shenzhen
UC Berkeley Summer Camp
Sichuan University International Office and University of California, Berkeley
BEng Automation (Electrical Engineering)
Sichuan University
📚 My Research
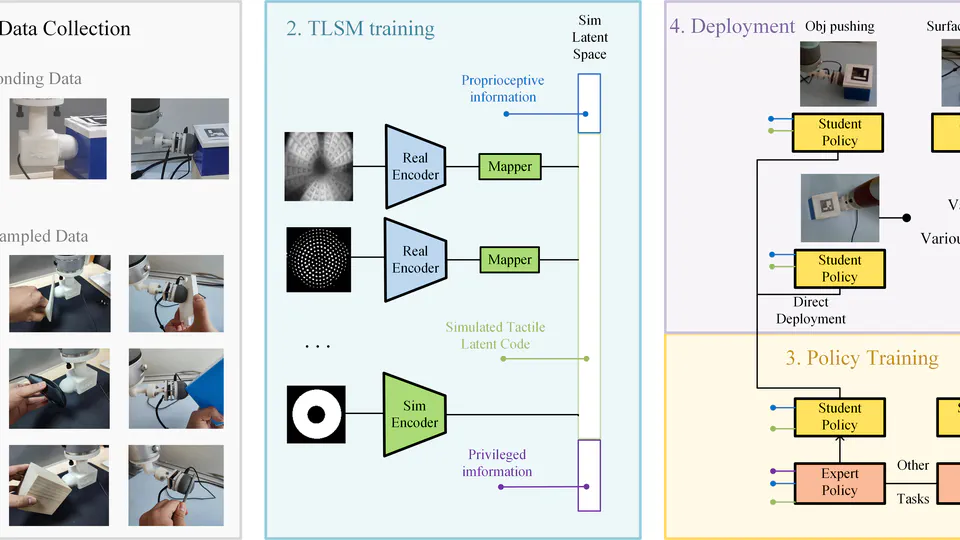
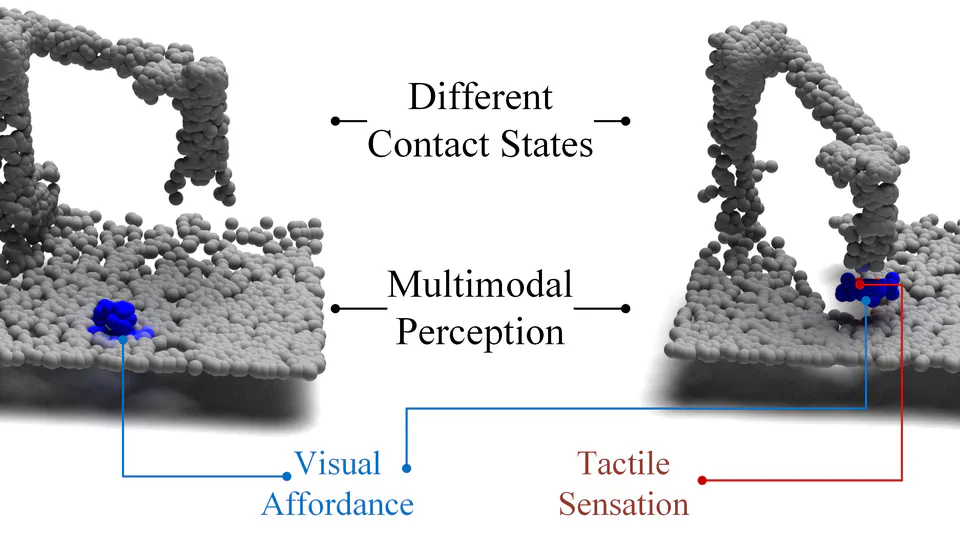
My current research focuses on visuo-tactile perception and dexterous manipulation in robotics. Additionally, I have been involved in several research projects focused on mobile robotics. Looking forward, I aim to further explore dexterous manipulation with multi-modal perception. And I aspire to investigate the integration of large language models with robotic systems to enhance their intelligence and generalization capabilities.
Featured Publications (First Author)