Rapid Tactile Transfer Framework for Contact-Rich Manipulation Tasks
Oct 19, 2024· ,,,,,·
0 min read
,,,,,·
0 min read
吴启伟
Xuanbing Peng
Jiayu Zhou
Zhuoran Sun
Xiaogang Xiong
Yunjiang Lou
Abstract
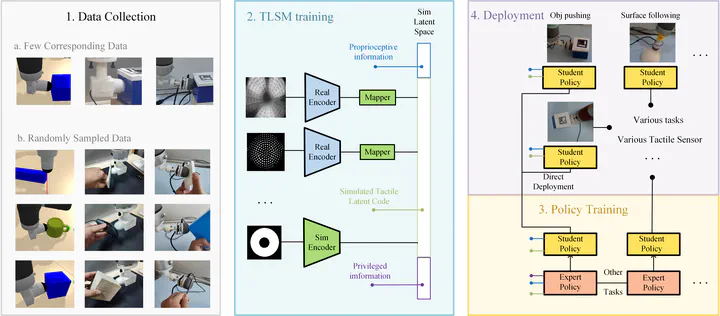
An increasing number of robotic manipulation tasks now use optical tactile sensors to provide tactile feedback, making tactile servo control a crucial aspect of robotic operations. This paper presents a rapid tactile transfer framework (RTTF) that achieves optical-tactile image sim2real transfer and robust tactile servo control using limited paired data. The sim2real aspect of RTTF employs a semi-supervised approach, beginning with pretraining the latent space representations of tactile images and subsequently mapping different tactile image domains to a shared latent space within a simulated tactile image domain. This latent space, combined with the proprioceptive information of the robotic arm, is then integrated into a privileged learning framework for policy training, which results in a deployable tactile control policy. Our results demonstrate the robustness of the proposed framework in achieving task objectives across different tactile sensors with varying physical parameters. Furthermore, manipulators equipped with tactile sensors, allow for rapid training and deployment for diverse contact-rich tasks, including object pushing and surface following.
Type
Publication
In IEEE/RSJ International Conference on Intelligent Robots and Systems