Tactile Affordance in Robot Synesthesia for Dextrous Manipulation
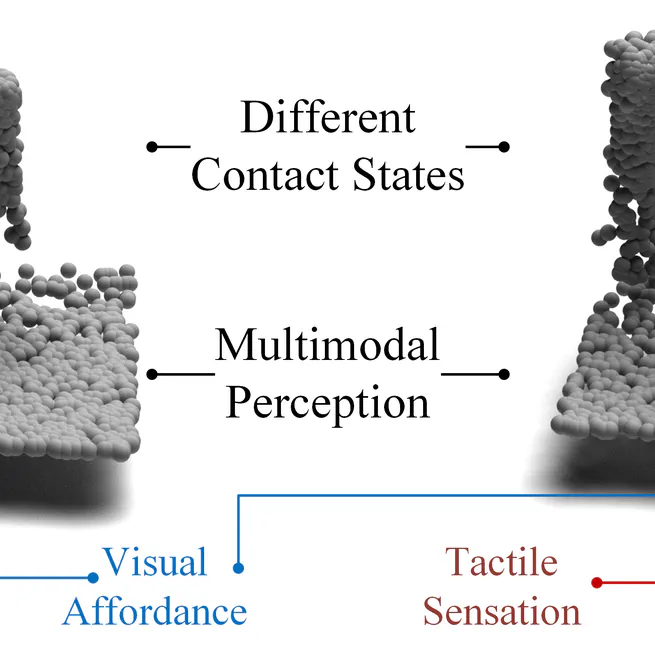
This study introduces the Tactile Affordance for Robot Synesthesia (TARS) framework, which integrates visual and tactile feedback through a unified point cloud representation to enhance dexterous robotic manipulation in both contact and non-contact scenarios.
Jul 28, 2024