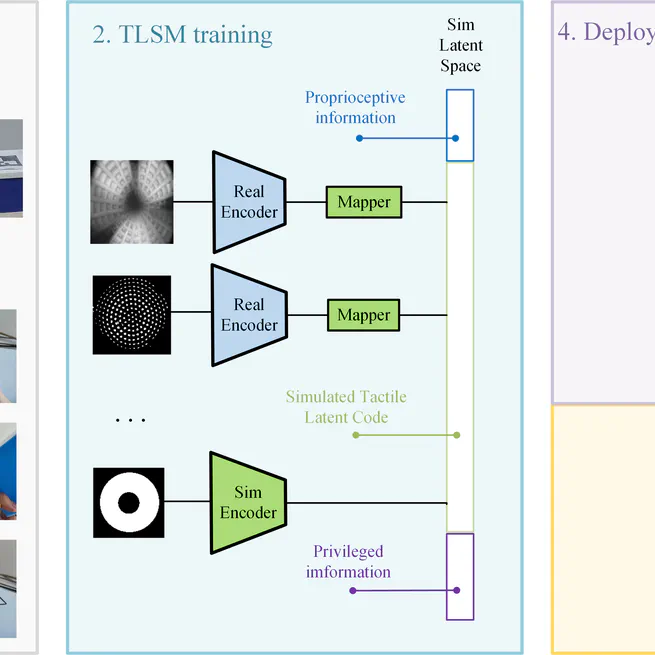
Rapid Tactile Transfer Framework for Contact-Rich Manipulation Tasks
This paper introduces a rapid tactile transfer framework (RTTF) that uses semi-supervised learning to achieve robust tactile servo control and sim2real transfer for robotic manipulation tasks with limited data.
Oct 19, 2024
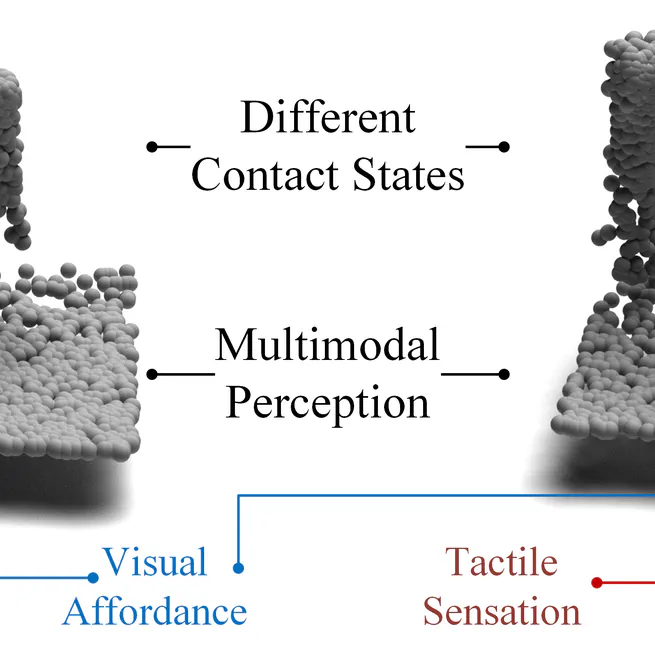
Tactile Affordance in Robot Synesthesia for Dextrous Manipulation
This study introduces the Tactile Affordance for Robot Synesthesia (TARS) framework, which integrates visual and tactile feedback through a unified point cloud representation to enhance dexterous robotic manipulation in both contact and non-contact scenarios.
Jul 28, 2024